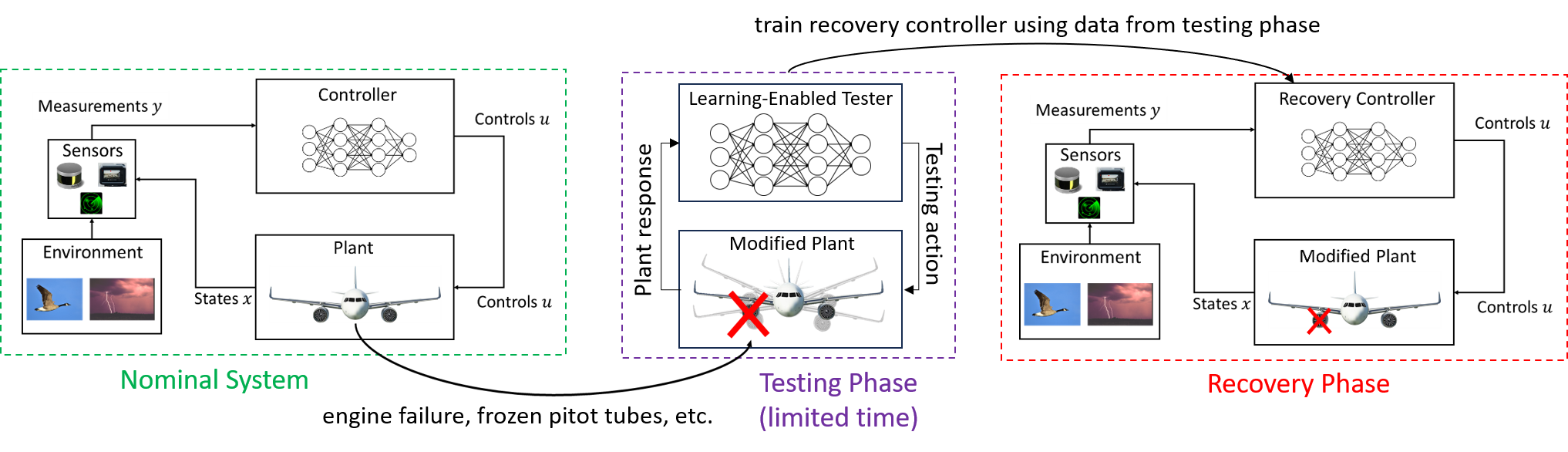
Assured Recovery: Training, Testing and Verification of Autonomous Systems with Recovery Capabilities
Fulfilling the tremendous promise of autonomy requires developing autonomous
systems that (i) operate in dynamic and adversarial environments and (ii) are capable of recovering from
events which cannot be modeled, predicted or trained for at design time. There is a need for the breakthrough
capability of autonomous recovery, inspired by impressive acts of human recovery (e.g., following engine
failure caused by bird strikes, the captain of US Airways Flight 1549 glided the plane into the Hudson river).
Autonomous recovery will require powerful learning-enabled components (LECs) that -- upon encountering an
adverse event, e.g., engine failure with wing damage -- (i) test the modified system's limits so as to (ii) learn a
recovery controller within limited time. We aim to develop and verify a methodology to train a learning-enabled tester
(LET) which performs limited-time exploratory testing on the real system in complex and unpredictable scenarios. The
output of the LET will be a recovery controller that ensures the system's safe recovery and further operation under
the new degraded conditions. Success of the research will enable the deployment of resilient autonomous systems on
complex missions, in adverse conditions, and remote locations.
Neuro-Symbolic Bridge: From Perception to Estimation and Control
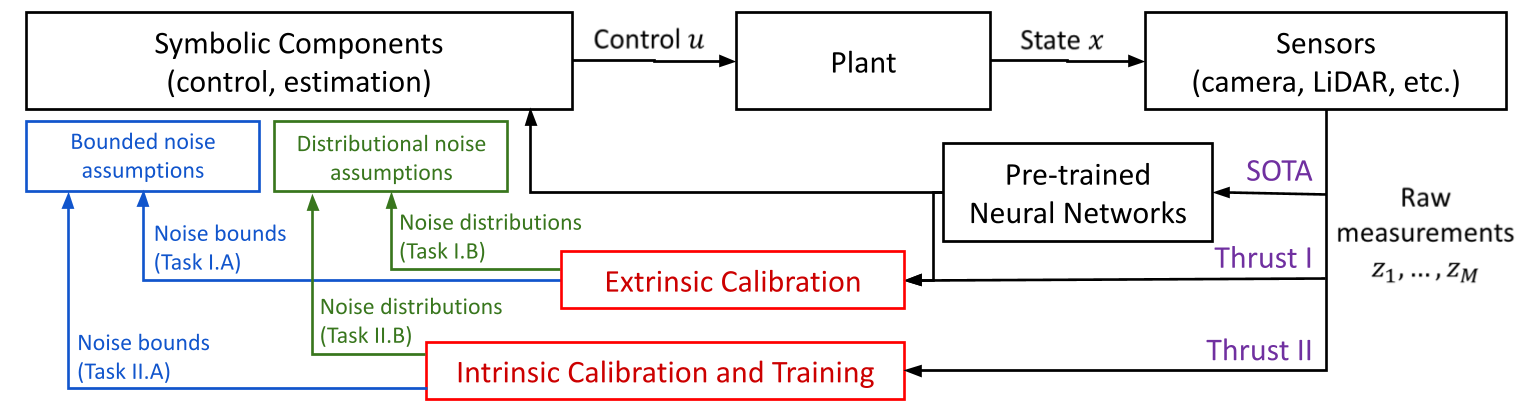
Modern cyber-physical systems (CPS) are
increasingly neuro-symbolic. A typical CPS control
pipeline consists of 1) neural networks (NNs),
used to process raw high-dimensional data, such as
camera images, and 2) downstream symbolic
components, such as state estimation and control,
that take the NNs' output in order to close the
loop. However, there is a fundamental mismatch
between the uncertainty on the NN outputs and the
assumptions of the downstream components. NNs are
known to be vulnerable to even minor input
perturbations and distribution shifts that make it
hard to characterize the properties of NN
outputs. In turn, such robustness issues violate
the symbolic tasks' assumptions and guarantees,
thus compromising the overall system safety and
predictability. We aim to develop neuro-symbolic
calibration and training methods that repair the
fundamental neuro-symbolic mismatch. The research
would enable the application of powerful symbolic
tasks (e.g., resilient state estimation and robust
control) to modern perception-based CPS where the
presence of NNs might otherwise violate the
symbolic tasks' assumptions.
Assured Autonomy
The recent improvements in sensing, perception and
control have enabled the development of autonomous
systems in multiple safety-critical domains such
as autonomous driving, unmanned rockets, drones,
and medical devices. However, the neural networks
used in these systems often fail in seeminlgy
arbitrary ways, as is the case with adversarial
examples. Such issues highlight the need to assure
the safety of autonomous systems with
leaning-enabled components (LECs) before they are
deployed at scale. To achieve high assurance, I am
exploring a collection of design-time and run-time
techniques. At design time, my contribution is a
verification technique for closed-loop systems
with neural network components, as described next.
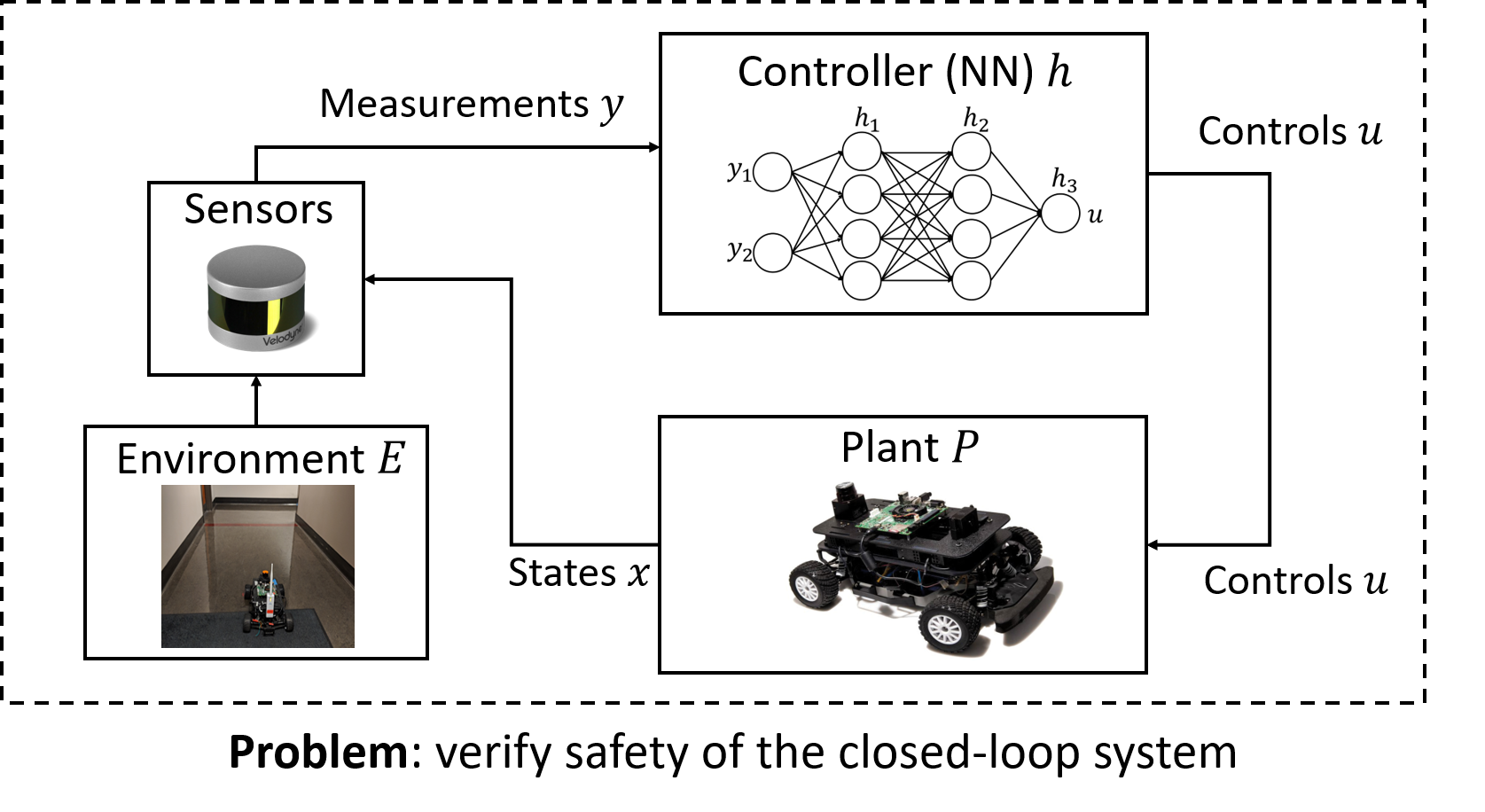
Verifying Safety of Autonomous Systems with Neural Network Components
The closed-loop verification problem we consider
is illustrated in the figure on the right. We
consider an autonomous system that operates in a
known environment. The system has access to
different measurerements of its state and the
environment, which are then sent to a neural
network (NN) controller that closes the
loop. Given a hybrid system model of the plant's
dynamics and measurement model, the goal is to
verify that the system does not reach any unsafe
states (e.g., a crash), when started from a given
set of initial conditions. The main challenge in
this problem is how to handle the NN since NN
verification is NP-hard even for simple
input/output properties. The key idea of our
approach is that a NN with sigmoid activations can
be transfrmed into an equivalent hybrid
system. Specifically, since the sigmoid is the
solution to a quadratic differential equation,
each neuron can be mapped to a state and each
layer can be mapped to a mode in a hybrid
system. Finally, the NN's hybrid system can be
composed with the plant's hybrid system, thereby
casting the verification problem as a hybrid
system reachability problem which can be solved by
optimized tools (e.g., Flow*).
We implemented
our approach in a tool
called Verisig. We evaluated Verisig
on a number of case studies: 1) a reinforcement
learning benchmark called Mountain Car, 2) an
unmanned aerial vehicle trying to reach a goal
without colliding into obstacle, 3) a
NN-controlled car that navigates a structured
environment using LiDAR measurements. To validate
the verification result, we also performed real
experiments for the 3rd case study, in which the
car can successfully navigate a hallway
environment without colliding into walls. Note
that this is an end-to-end NN controller that
takes LiDAR measurements as input and produces
control actions as output. A video with the
experiments is shown on the right. Verisig can
currently scale up to NNs with several hundred
neurons per layer and roughly a dozen layers,
i.e., NNs that are sufficiently large for a large
number of applications, as suggested by the
diversity of our case studies.
Security of Cyber-Physical Systems
The increasing autonomy and sophistication of modern CPS have led to multiple accidents in the last few years, caused not only by component failures but also by malicious attacks exploiting communication vulnerabilities, software bugs, etc. These accidents have exposed the need for a unifying theory for analyzing the safety of such systems even in the presence of faults and attacks. The main challenge for developing such techniques is that, due to the complexity of modern CPS, components might experience unexpected faults or attacks and behave in arbitrary ways. This means that no assumptions can be made about how or when components might fail.
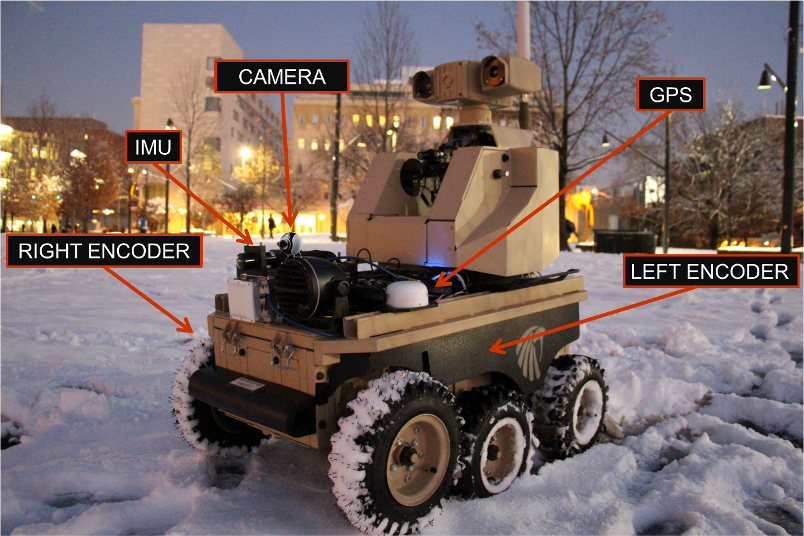
Safety Detection Using Sensor Fusion
To address the above challenges, we make use of
the fact that modern CPS have multiple redundant
sensors that can be used to estimate the same
state. For example, the LandShark robot (shown on
the right) has five sensors that can be used to
estimate its speed. Given this redundancy, the
system can tolerate failures and attacks in some
of its sensors, provided that it uses the
remaining correct ones. In order to formalize this
concept, we developed sensor fusion techniques for
detecting when the systems is unsafe even in the
presence of attacks and faults. While sensor
fusion eliminates the need to assume how and when
sensors might fail, it comes at a cost as well --
more than half of all sensors must operate
correctly. This is a reasonable assumption because
it is unlikely that these diverse sensors will
fail or be attacked at the same time. Given this
assumption, sensor fusion outputs a bounded set
that is guaranteed to contain the true state and
can be used to detect if the system is unsafe.
In addition to the initial approach, we explored
ways of adding more information to sensor fusion
in order to improve its output. In the
first extension, we modified the
algorithm by incorporating historical measurements
and mapping them to the current time using system
dynamics. We developed multiple approaches to
using historical measurements and identified the
best ones under different conditions. Regardless
of the method used, using historical measurements
always results in tighter bounds on the output of
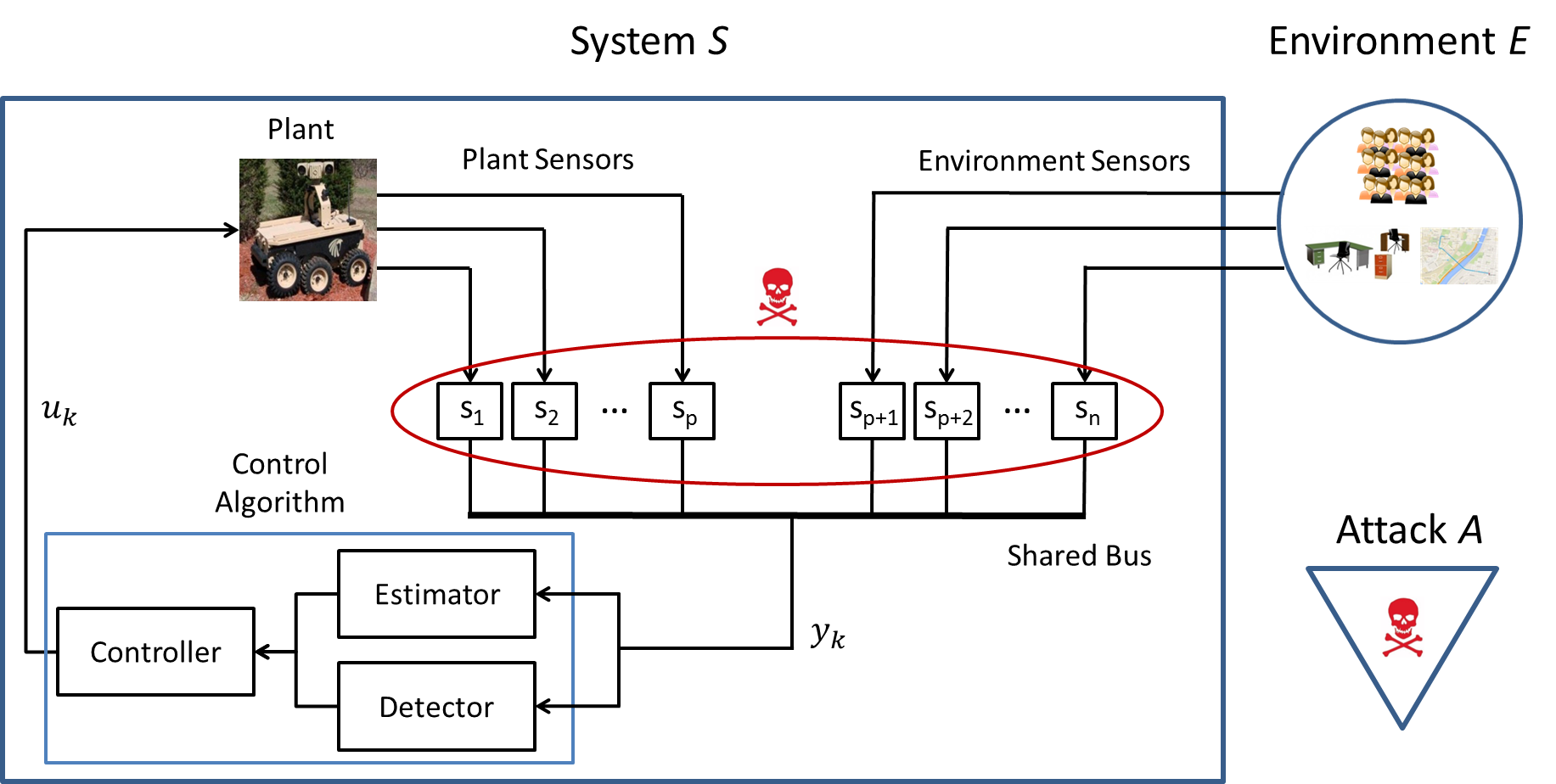
sensor fusion. In the second modification
to the sensor fusion algorithm, we note
that modern CPS are built in a time-triggered
fashion such that each sensor transmits its
measurement during a predefined time-slot,
effectively creating a schedule of measurement
transmissions. Since these systems usually use
shared buses (e.g., a CAN bus) where each
measurement is broadcast to all nodes, the
attacker can examine all other measurements before
sending the spoofed measurements. Thus, we
analyzed the impact of different transmission
schedules on the attacker's information and
provided both theoretical and experimental results
in favor of the Ascending schedule, the one that
schedules most precise sensors first. A video
illustrating the benefit of the Ascending schedule
is shown on the right.
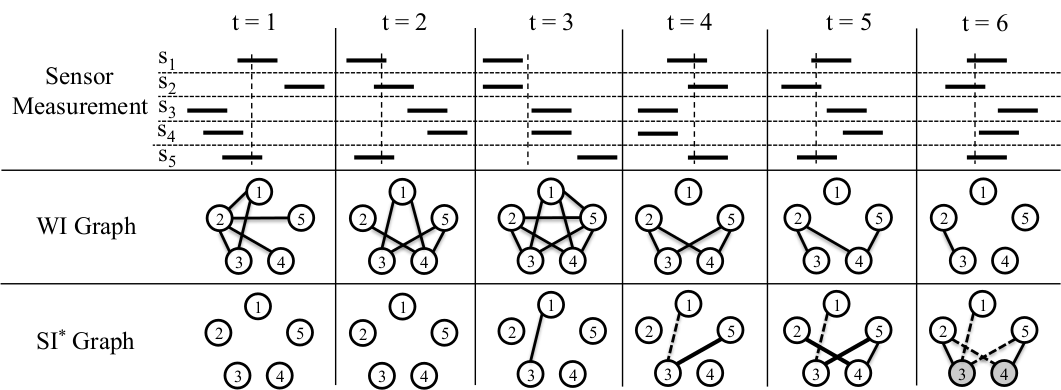
Sensor Attack Detection
In order to further improve the output of sensor fusion (and of other components using sensor data), we also developed techniques for sensor attack detection and identification. Similar to the sensor fusion framework, in this work we also use sensor redundancy so as to avoid making unrealistic assumptions about how and when faults/attacks might occur (in existing anomaly detection works, it is either assumed that the system has a known initial condition or that the attack/fault has a known effect). Since sensors often experience transient faults that are a normal part of system operation (e.g., GPS losing its connection in a tunnel), we introduced the notion of a transient fault model for each sensor and developed an approach for identifying such models from data. Given such transient fault models, we presented an attack detection method (based on pairwise inconsistencies between sensor measurements, as shown on the right) that only flags attacks and does not raise alarms due to transient faults. We evaluated our approach using real data from the LandShark that was retrospectively augmented with various attacks -- our approach was eventually able to detect all sensor attacks.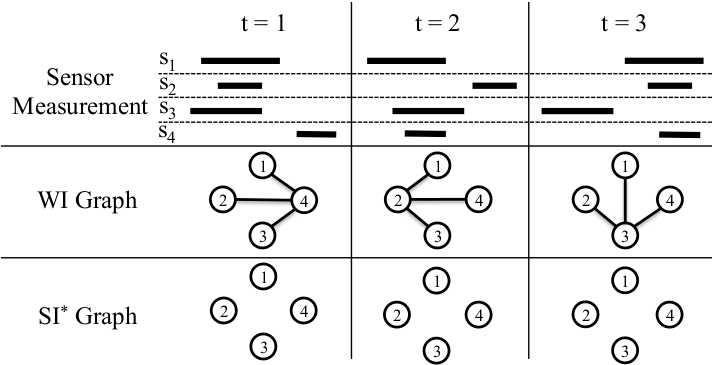
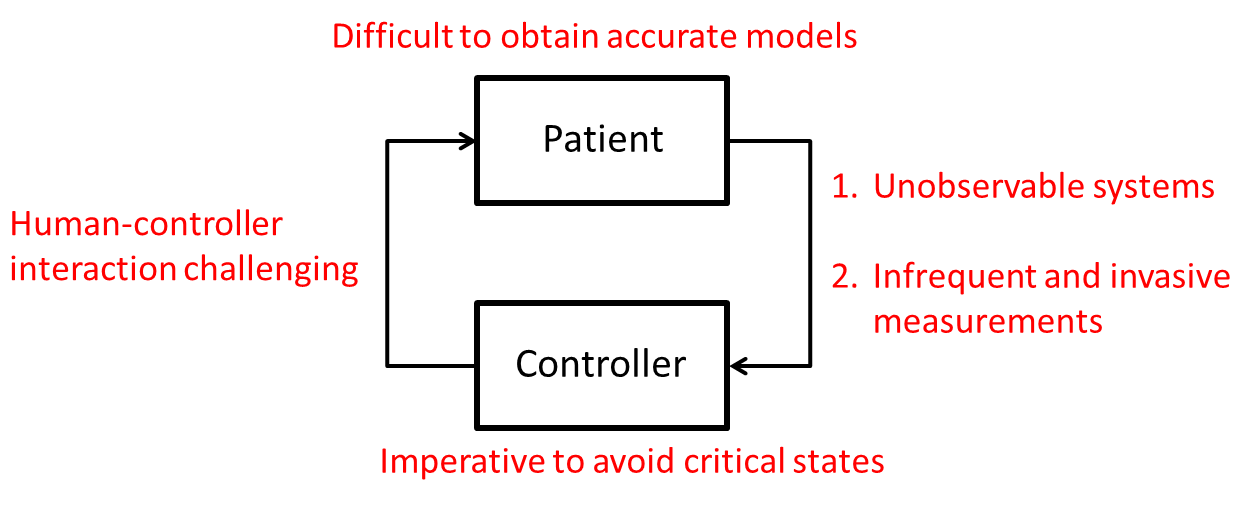
High-Assurance Medical Cyber-Physical Systems
The increasing sophistication of medical devices
in modern operating rooms presents a great
opportunity to develop medical CPS. In particular,
it is now possible to obtain the patient's vital
sign data (e.g., heart rate, blood pressure) in
real time and build algorithms to analyze the
patient's condition and provide decision support
to clinicians. At the same time, there are
multiple challenges when building such a
system. If we consider the typical
plant-controller loop in the medical CPS setting
(shown on the right), there are challenges at each
level: 1) it is difficult to develop high-fidelity
physiological models, 2) measurements are often
infrequent, invasive or missing, 3) there are very
strict requirements on the performance of these
systems due to their safety criticality, 4) it is
important to ensure a smooth human-machine
interaction.
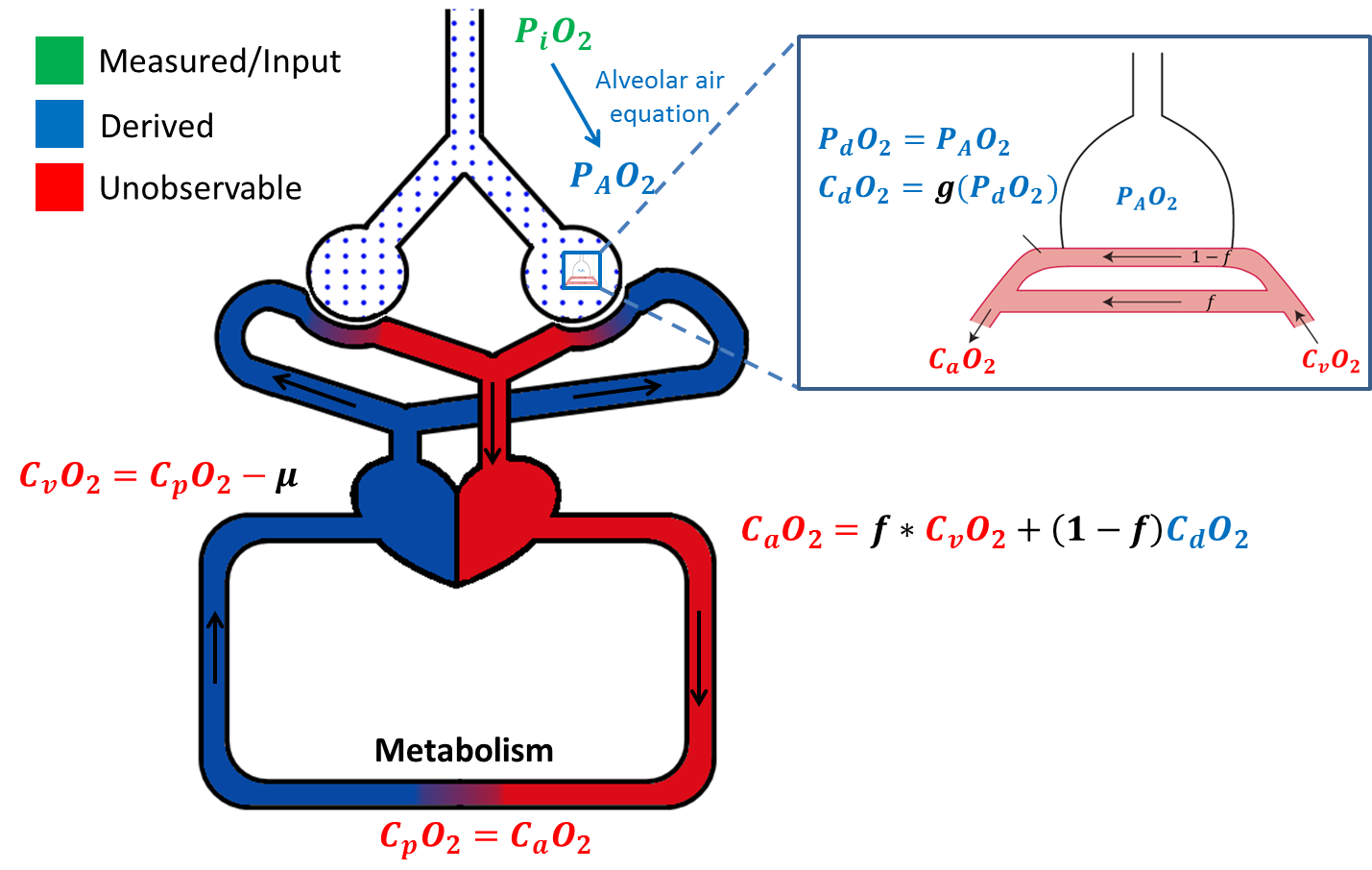
Estimation of Blood Oxygen Content Using Context-Aware Filtering
As a first step towards the development of medical
CPS, we focused on one of the most closely
monitored vital signs, namely blood oxygen
content. Estimating the blood oxygen content is a
challenging problem because measurements are
mostly available on the pulmonary side whereas the
goal is to estimate a state on the blood
side. Thus, we built a physiological model
(illustrated on the right) mapping the available
measurements to the state. Since this model
contains multiple parameters that vary widely with
patients (and cannot be identified due to
insufficient data), we use additional information
in the form of context, i.e., high-level
representation of low-level measurement data. For
example, a patient's oxygen saturation measurement
is hard to use directly for estimation purposes
but if the overall saturation is low, then we can
conclude that the overall oxygen content is also
low. We developed the context-aware filter in
order to handle such context measurements in
addition to standard continuous measurements. We
applied our approach to data from the Children's
Hospital of Philadelphia (CHOP) and were able to
achieve about 20% improvement in performance over
prior work.
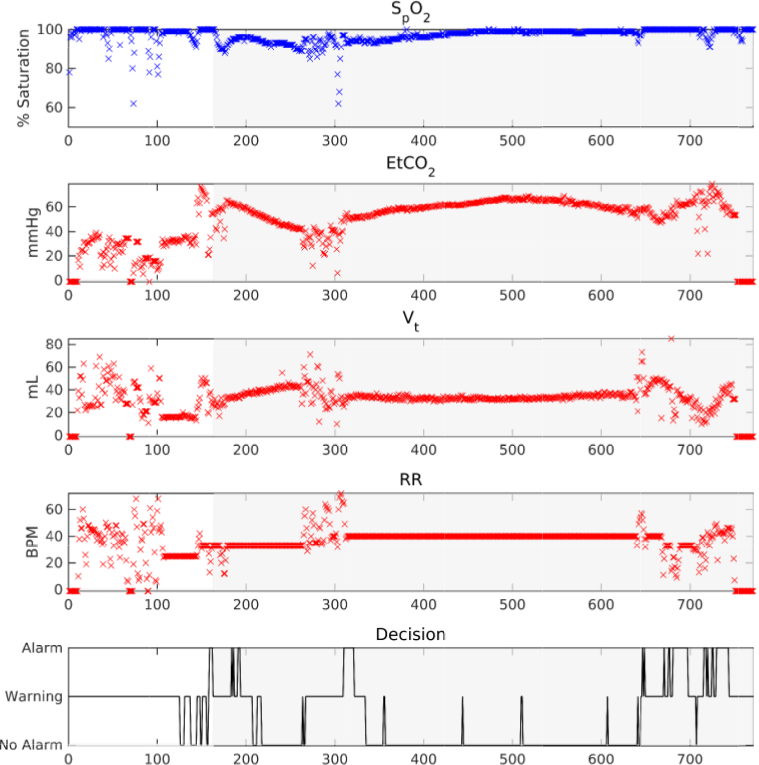
Prediction of Critical Pulmonary Shunts in Infants
In addition to the estimation problem described
above, also investigated the problem of detecting
drops in blood oxygen content as caused by
pulmonary shunts in infants. Pulmonary shunts
occur frequently during lung surgery where the
perioperative lung is not ventilated in order to
be kept still for surgery. Such shunts are
especially dangerous for infants who have
underdeveloped lungs and may not receive enough
oxygen through one lung. In order to detect when
such a shunt might lead to a drop in the patient's
oxygen content, we developed a parameterized
physiological model, similar to the estimation
setting, mapping the measurements to the system
state. Unlike the estimation setting, the
detection problem does not require estimating the
model parameters -- we employ a
parameter-invariant technique in order to provide
guaranteed false alarm performance for each
patient regardless of their specific
physiology. We applied our approach to data from
lung lobectomies at CHOP and achieved a detection
rate of about 85% with a potentially life-saving
early warning of 90 seconds on average. In
addition, our approach achieved a near-constant
false alarm rate of 0.95 false alarms per hour. An
example case with good detection is shown on the
right (shaded area denotes the beginning of the
shunt).